
The Best Poster award from ISAL 2025 has been bestowed on Felix Glatzel and his colleagues at TU Dortmund’s Institute of Control Theory and Systems Engineering. Their poster, headlined Energy-Efficient Pedestrian Marker Light Based on Pose-Probability for Computer Vision, described a method of leveraging the proliferation of high-definition matrix headlamps to provide a pedestrian marking light function. This is when pedestrians are detected and spotlit to make sure the driver sees them. Glatzel and his team noted that most of them illuminate a bigger-than-necessary area, creating light pollution and glare and wasting energy.
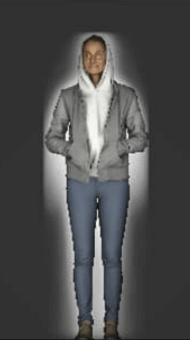
Their approach proposes to selectively illuminating pedestrians without the waste. They scrutinized the probability of each headlamp light ray within a pedestrian’s bounding box reaching the pedestrian, and based on that analysis an adaptive luminous intensity distribution (LID) is developed for the pedestrian within the bounding box. This “pose-probability LID” is then adjusted to the bounding box of pedestrians once they are detected. As shown here, illumination of features like the head, shoulders and legs can be more precise than the illumination of the full bounding box.
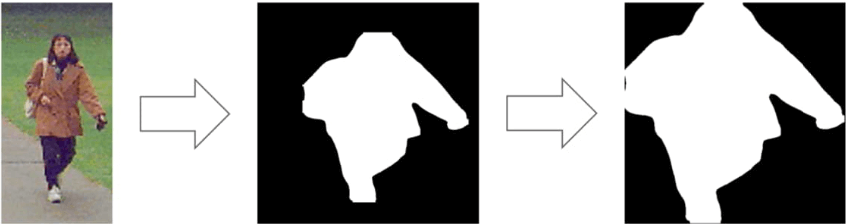
405 images are processed from the PETA pedestrian dataset. First, each image is reshaped to a square of 640 × 640 image pixels. Each reshaped image is then processed with a YOLOv8 detection neural network to detect the bounding box coördinates of the pedestrians in the image, while a YOLOv8 segmentation neural network divides the same image into two segments: the pedestrian and the surroundings. The bounding box is then extracted from the segmented image. To normalize the data across the different images in the set, the cut-out segmented bounding box is then reshaped into a 640 × 640-pixel square image.
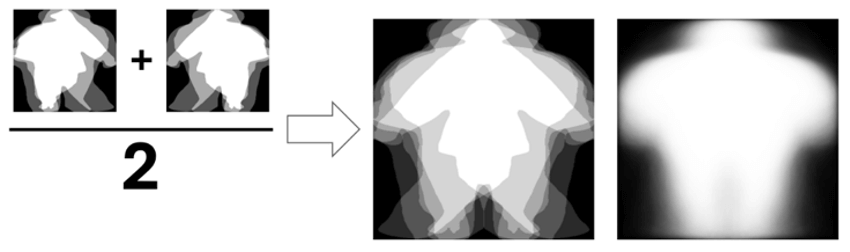
The reshaped cutouts of the images are then overlaid and averaged, resulting in a heatmap of the pose-probability of the pedestrians to their assigned bounding boxes. To make the pose-probability LID symmetrical, it is overlaid and averaged with its mirrored self, effectively doubling the number of poses considered for the LID. With all generated matrices overlayed, the resulting pose-probability LID resembles a blurred human or a snow angel.
Once the pose-probability LID is symmetrically averaged, it can be modified by applying different, pixelwise weight functions to brighten or darken specific areas. An optional additional step can apply specialized modifications to the heatmap. For example, a glare-free pedestrian marker light can be implemented by dimming down the area resembling the head in the LID.

To evaluate the pose-probability LID, six scenarios are investigated in a simulation environment in Unreal Engine 5. All of them consist of a scene with a free night sky in the background, an asphalt floor, and one pedestrian. In three of the scenarios the pedestrian has bright clothing, and dark clothing in the other three; bright clothing gives higher contrast between the pedestrian and the background. Detection quality is determined by the confidence (Conf) and intersection over union (IoU) of a YOLOv8 network.
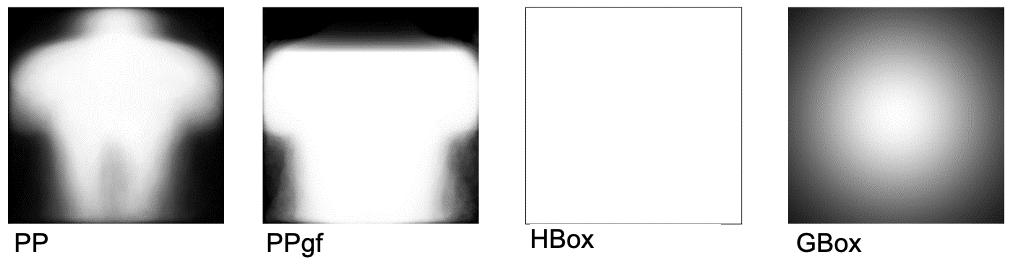
Two variants of the pose-probability LID are evaluated against two other LIDs that are also adapted to the pedestrian bounding box. PP is the pose-probability LID and PPgf is a pose-probability LID that is brightened up with a weight function and has a dimmed-down glare-free area. HBox resembles the illumination of the full bounding box and GBox is an LID that is based on a 2D Gaussian bell.
The evaluation shows different results depending on whether the clothing is bright or dark for the pedestrians. In scenarios with high contrast between pedestrians and the background, PP, PPgf, and GBox have the potential to maintain comparable detection quality to HBox with a Conf around 80 per cent and an IoU around 90per cent, while reducing energy consumption. With a background illumination of 30 per cent brightness and a maximum brightness of 100 per cent, PP saves 29.7 per cent; PPgf saves 19.1 per cent, and GBox saves 33.5 per cent of energy inside the bounding box, compared to HBox, which has a brightness of 100 per cent.
With low contrast between pedestrians and the background, things are different. In one low-contrast scenario, PP and PPgf (56.1% and 61.2% Conf; 85.4% and 88.9% IoU, respectively), and GBox (38.9% Conf, 88.1% IoU) performed significantly worse than HBox (70.0% Conf, 91.5% IoU). However, in the remaining two low-contrast cases, PP and PPgf achieve comparable detection to HBox (Conf around 75%, IoU around 93%). GBox performs significantly worse (Conf around 58%, IoU around 79%) in the remaining low-contrast scenarios. The pose probability LID outperforms the 2D Gaussian bell LID in terms of detection quality and consumes less energy than illuminating the entire bounding box while maintaining a similar detection quality.
The evaluation shows mostly good performance of the pose-probability LID for static cases. However, performance in dynamic cases, such as tracking capabilities between multiple frames, remains to be evaluated. Results from these evaluations can be used to develop further advanced LIDs, including additional pedestrian poses and possible modifications (e.g., to enhance tracking performance in dynamic cases).









