
ISAL 2025 最佳海报奖授予了多特蒙德工业大学控制理论与系统工程研究所的 Felix Glatzel 及其同事。他们的海报标题为《基于姿态概率的计算机视觉节能行人标志灯》,介绍了一种利用高清矩阵大灯普及来提供行人标志灯功能的方法。该功能在检测到行人时会进行聚光,以确保驾驶员能够看到他们。Glatzel 及其团队指出,大多数灯光会照亮比实际需要更大的区域,这会造成光污染和眩光,同时浪费能源。
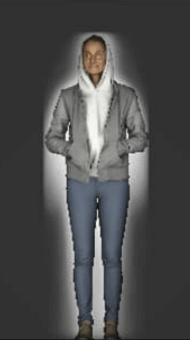
他们的方法提出选择性地照亮行人,从而避免浪费。他们仔细分析了每束车灯光线在行人边界框内到达行人的概率,并基于该分析为边界框内的行人开发了一种自适应发光强度分布(LID)。这种“姿态-概率发光强度分布”在检测到行人后会调整到行人的边界框上。如图所示,对头部、肩部和腿部等特征的照明可以比对整个边界框的照明更精确。
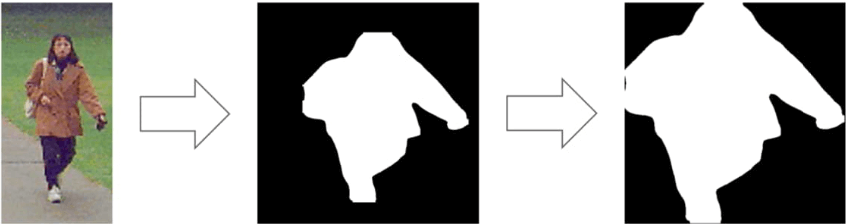
从 PETA 行人数据集中处理了 405 张图像。首先,每张图像被重新调整为 640 × 640 像素的正方形。然后,每张调整后的图像通过 YOLOv8 检测神经网络处理,以检测图像中行人的边界框坐标,同时 YOLOv8 分割神经网络将相同的图像分成两个部分:行人和周围环境。随后从分割图像中提取边界框。为了在不同图像之间规范化数据,剪切出来的分割边界框随后被重新调整为 640 × 640 像素的正方形图像。
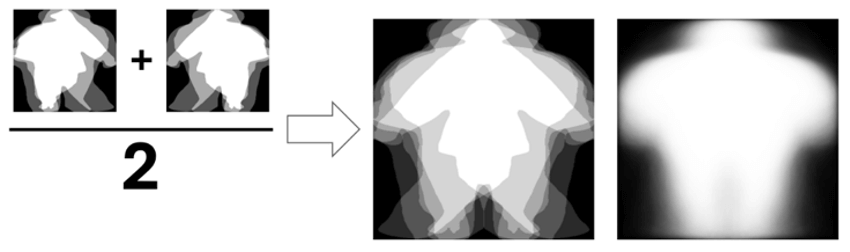
图像的重塑裁剪部分随后被叠加并取平均,从而生成行人对应边界框的姿态概率热图。为了使姿态概率 LID 对称,它会与自身的镜像叠加并取平均,从而有效地将用于 LID 的考虑姿态数量翻倍。在所有生成的矩阵被叠加后,得到的姿态概率 LID 类似于模糊的人形或白雪天使。
一旦姿态概率 LID 被对称平均后,可以通过应用不同的像素级权重函数来修改,以使特定区域变亮或变暗。可选的额外步骤可以对热图进行专门的修改。例如,通过调暗 LID 中类似头部的区域,可以实现无闪光的人行标记灯。为了评估姿态概率 LID,在 Unreal Engine 5 的仿真环境中研究了六种情景。所有场景都包含一个背景为自由夜空、铺有沥青地面的场景,以及一名行人。在三种情景中,行人穿着明亮的衣服,在另外三种情景中穿着深色衣服;明亮的衣服使行人与背景之间的对比度更高。检测质量由 YOLOv8 网络的置信度(Conf)和交并比(IoU)来决定。

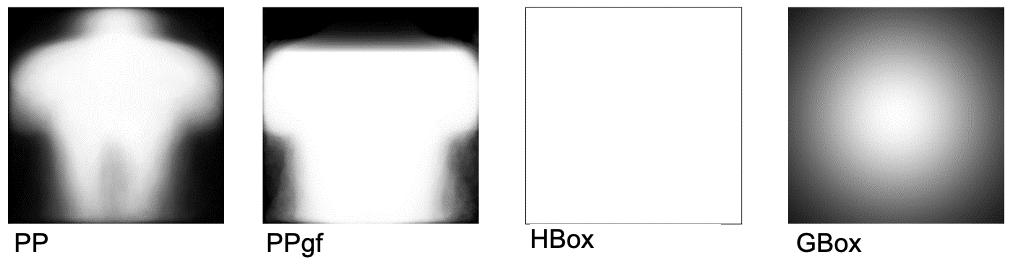
对两种姿态概率 LID 变体进行了评估,并将它们与另外两种也适用于行人边界框的 LID 进行了比较。PP 是姿态概率 LID,而 PPgf 是一种通过加权函数增强亮度并具有抑光无眩光区域的姿态概率 LID。HBox 类似于整个边界框的光照,而 GBox 是基于二维高斯钟形曲线的 LID。
评估显示,对于行人衣物是亮还是暗,结果会有所不同。在行人与背景对比度较高的场景中,PP、PPgf 和 GBox 有可能在保持与 HBox 可比的检测质量的同时(置信度约为 80%,IoU 约为 90%),降低能耗。在背景亮度为 30%、最大亮度为 100% 的情况下,PP 在边界框内节省了 29.7% 的能量;PPgf 节省了 19.1%,GBox 节省了 33.5%,而 HBox 的亮度为 100%。
当行人和背景之间的对比度较低时,情况会有所不同。在一个低对比度的场景中,PP 和 PPgf(分别为 56.1% 和 61.2% 置信度;85.4% 和 88.9% IoU)以及 GBox(38.9% 置信度,88.1% IoU)的表现明显不如 HBox(70.0% 置信度,91.5% IoU)。然而,在另外两个低对比度的案例中,PP 和 PPgf 的检测表现与 HBox 相当(置信度约为 75%,IoU 约为 93%)。GBox 在剩余的低对比度场景下表现明显较差(置信度约为 58%,IoU 约为 79%)。在检测质量方面,姿态概率 LID 优于二维高斯钟形 LID,并且在保持类似检测质量的同时,比照亮整个边界框消耗的能量更少。
评估显示,在静态情况下,姿态概率LID的性能总体良好。然而,在动态情况下的性能,例如多帧间的跟踪能力,仍有待评估。这些评估结果可用于开发更高级的LID,包括增加额外的行人姿态以及可能的改进(例如,增强动态情况下的跟踪性能)。









