Over 150 exhibitors, over 120 conference speakers, and thousands of visitors from across the European vehicle safety, validation and autonomous driving sector attended the ADAS & Autonomous Vehicle Technology Expo Europe 2023.

Renault’s Stéphane Reignier – Immersive Simulation Expert Leader
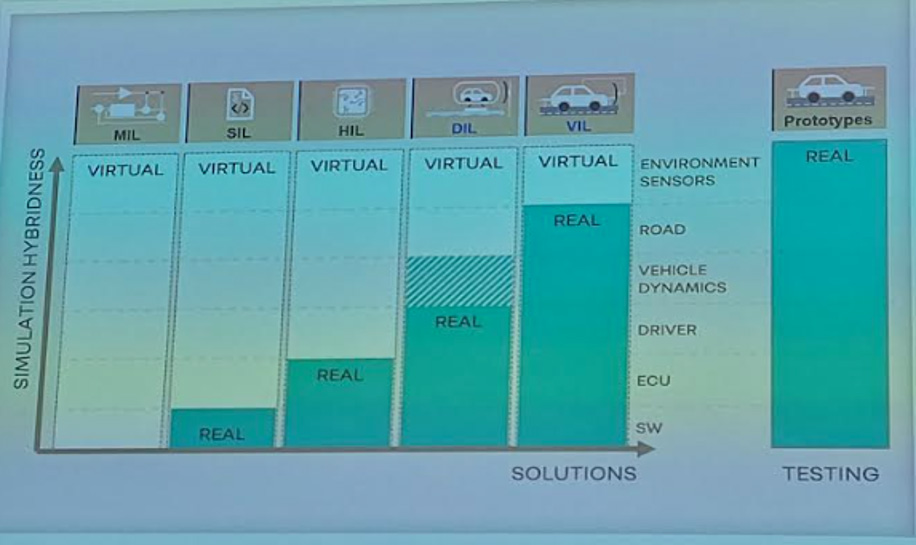
• Digital homologation is on its way, step by step.
• Simulation serves a shift-left approach, with earlier and continuous utilisation. Simulation environments are key (scenario databases).
• Simulation must be part of the homologation; Renault has a partnership with UTAC, and active discussions with UNECE.
• Interoperability and standards will be required.
• The main issue is to verify the simulation tools are reliable, which requires to benchmark the simulation software and the real world.

Stellantis’ Vincent Abadie ADAS and AD Senior Fellow
• AD is not ADAS: a reliable detection is key, including sensor redundancy.
• No compromise between false positives and false negatives,
• 3 pillars for validations: simulation (functions), test track (scenarios), open road (data collection).
• Safety targets: global target but also target by scenario.
• “Simulation software is not yet mature for all sensors; a 100% virtual validation is not realistic”.

Easy Mile’s Fabian Schäfer – Sales Manager
• Business model: first/last mile for public transportation operators.
• Partnership with Renault & Keolis, commercial applications in 2025.
• Deployment: certification for the EU market as a first step.
• New shuttle ready in 2025 (17-20 seats, speed up to 40 km/h).
• Sensor suite: lidars and cameras.
• Key topic: ODD and sensor cleaning.
• “The biggest limitation for the deployment is related to the localization which requires precise reference points / landmarks”.

Valeo’s Benazouz Bradaï – AD Innovation Platform Manager
• AD homologation: audit, test tracks (scenarios), open road
• Audit to check the understanding of the AD system; the design/validation process must be complete and consistent.
• Scenarios: some can be tested, some not (simulations).
• Safety targets: the definition of quantitative targets is key.
• “Sensor digital twin: a high-fidelity sensor model is available for the Valeo lidars, also working for bad weather conditions”.
Valeo’s Ahmed Yousif – Lidar System Simulation Expert
• Valeo’s lidar sensor model uses the ASAM OSI Open Simulation Interface.
• It includes an ideal data manager, a tracking module, a KPI manager module with an option to simulate bad weather conditions.
• It can manage multiple object categories such as vehicles, trucks, pedestrians, buildings, lanes…
• “A good sensor model must simulate the occlusion and merged objects effect, and keep some memory of the tracks out of the FoV”

Ansys’ Olaf Kath – Product VP
• MBSE is systems engineering with system architectural models,
• MBSE is using its own system engineering language,
• MBSE must demonstrate the safety of AD functions through linking safety by design with structured safety analysis, safety by V&V with massive parallel physics-based simulation and safety management plan, and compile the safety case,
• “Key is to connect all safety validations, with tools and analysis”.
DVN comment
Most of the presentations were related to the V&V process (validation and verification) required for homologation of autonomous vehicles. The consensus was to add more simulations at the start of the project (shift-left approach in the cycle) to reduce design modifications later in the project and set up mode- based systems Engineering (MBSE) to build a consistent safety case along the development.
Nevertheless, simulation tools must also be validated as such, and be correlated to the real world. Vinfast found the correlation ratio was only 72 per cent, showing the current limitations of the simulations. Radar sensors are the most difficult.
Only a few presentations were related to lidar technology; there was an interesting presentation about lidar sensor simulation models from Valeo. Velodyne’s VP Sunil Khatana was to expound on the economics of enabling technologies for lidar, but that regrettably didn’t happen.
Some lidar suppliers were present as exhibitors: Robosense, LS Lidar, Ouster, Microvision.










