I attended the SAE Automated Transportation Symposium in Phoenix AZ. The focus of the symposium was primarily on safety of Autonomous Driving, upcoming regulations, and how to comply, test, audit and benchmark safety of these systems.
Simulation was discussed as a necessary tool, but the challenge is how to certify the simulation models themselves. Insurance moves from driver based to product liability based, which opens the possibility (and costs) of huge awards.
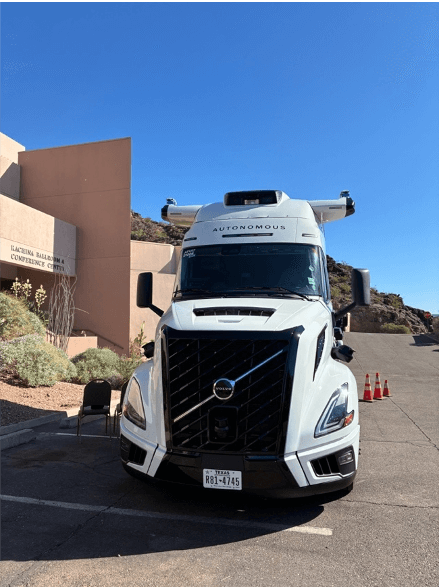
There were speakers from GM, Waymo, Nuro, Aurora, Tier IV and Zoox from the ADAS and robotaxi/truck OEMs/Operators. Aurora brought a demo truck and Waymo sponsored robotaxi rides.
Phoenix has been an early supporter of these technologies, thanks to the vision of the city council back in 2015. Aurora talked about reducing the 500,000 a year truck accidents and how safety is a priority. Their operators want hub-hub long distance operation due to a shortage of long-haul drivers. Aurora is expanding operations from Texas to Arizona and later to the entire US southern states in 2026. Over 3.8M miles have been logged in Texas with zero attributed collisions. Operators also get 10-13% better fuel efficiency due to less stops/idling and smoother driving.
A panel discussed the upcoming UNECE regulations that are targeted for adoption in June 2026. Regulating the entire automated driving task is an order of magnitude more complex than the functions that previous regulations have covered. A lot more testing is required for complex scenarios, and this will include virtual testing which has to match real-world scenarios. Automated driving requirements lead to safety cases and a safety management system for a specific product with documentation of goals, arguments and evidence that the system meets the safety cases and the regulations. The ADS requirements also include user integration requirements (for example to prevent misuse by the user), cybersecurity and OTA. A compliance assessment will include an audit of the safety management system and assessment of the test cases.
Fortellix discussed simulators and the fact that a methodology is required to assess the simulator. High fidelity sensor simulation is key. No accepted standard or metrics exists today to correlate sim to real-world gaps. ISO34506 is working on a standard. SAE J3279 has best practices for simulation. ASAM is launching a standard for quantifying simulation quality and EU Reg 2022/1426 has a credibility assessment framework for virtual testing toolchains.

A panel on remote assistance looked at different approaches to tele-operation. The Waymo Driver will request assistance for specific scenarios that are then handled by human operators. For example, moving past emergency vehicles partially blocking lanes. But the Automated Driving System is ultimately responsible for executing or rejecting the remote assistance suggestions. Training andcertifying remote operators is a key for safe operation along with a target for response times. AV systems should always be in control and safe – even if comms fail, for example, Nuro driver will pull over and wait in that case. Autoware has an open source model for remote assistance that has been deployed by multiple users.
Waymo reported that it is the first AV developer to complete third-party audits (by TUV SUD) for its safety case program and remote assistance operations.
An insurance panel discussed how insurers can control risk. Human drivers are insured based on past performance, however for AVs, there is not much accident data to use when writing policies. With no driver, an AV accident becomes a product liability case, with the potential for large jury awards in the US legal system. Pricing polices is a major challenge.
Benchmarking AV accident rates against human drivers is also not as simple as it seems. How do we define “good driving” ? Talking about overall accident rates is not sufficient, we need to look at specific types of accidents (and ODDs) and compare. Failure modes for AVs are different from human drivers. Perception blind spots, gaps in training data, calibration drift. What constitutes sufficient coverage ? Surrogates for accidents such as hard braking, swerving and near crashes can be used, but we need to be careful of how that correlates to actual accidents. Accident reporting also needs to be more granular for L4 vehicles. Over 80% of indicents for human drivers are not “police reportable” but have to be reported for AVs. A minor collision with a curb is very different from hitting a pedestrian. Waymo has driven over 96M miles and has 91% fewer serious injuries and 79% fewer airbag deployments than human drivers. Having passengers wear (rear) seatbelts alone can reduce the risk of serious injuries by 90%.

The Doordash DOT is operational in Phoenix for restaurant deliveries. Restaurant owners benefit because the bot reduces traffic congestion in the neighborhood, and the cool factor increases deliveries. Dashers are still better in certain domains. The bot uses lidars, radar, multiple cameras, plus microphone and ultrasound. It is Nvidia hardware based and uses internally developed software.









