
DVN’s Sensing & Applications business unit held a conference on 9 – 10 April in Novi, Michigan, addressing US-spec AEB (automatic emergency braking) to meet the challenging new FMVSS 127 requirements. Around 85 people from automakers, tier-1s, and technology suppliers attended, including experts in ADAS and lighting systems. DVN CEO Paul-Henri Matha opened the event with updates about DVN and our upcoming events in China and Germany.
The event marked the first time that the lighting and ADAS sectors of the DVN community engaged in a collaborative discussion to share ideas and address constraints and needs.

A third of the FMVSS 127’s AEB test scenarios occur at night, some without streetlights, and with only the vehicle’s low beam headlamps. Key questions include whether pedestrians can be detected with a simple front camera and current low beams, and if changes to the low beam are necessary—or even if they’re possible—to avoid additional costs for the ADAS sensor kit.Current lighting standards and regulations do not appear to offer a complete solution; adequate detection by cameras would require illumination where none exists today. Jody Allen from GM highlighted the modifications which would be required in low beams to enhance camera performance, noting the challenges posed by current regulations and IIHS test protocols. These protocols prohibit the use of ADB, which means it would be difficult to get enough light to let the cameras do an adequate job without increasing glare beyond the present levels, which are already spurring pitched complaints from the driving public.
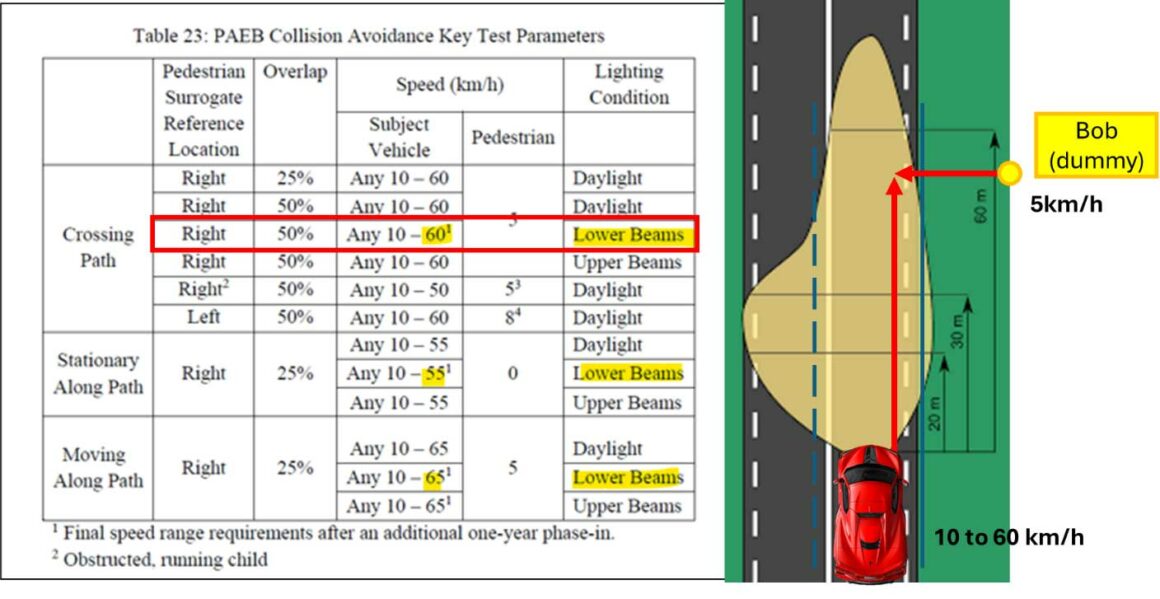
This example of a low beam pattern indicates that light is needed in specific areas for a camera to detect a pedestrian:

The illumination of a pedestrian along the 0° axis will vary and be partial, depending on their distance:

Pedestrian recognition by the camera varies with distance and azimuth position. For instance, a pedestrian 55m away and 5m to the right of the lane has an angle of 5.2°. Poor illumination hinders detection, which could be fatal by dint of too-late automatic emergency braking.
Questions arose regarding the adequacy of radar alone if the front camera falls short, the need for an additional sensor like an infrared camera for reliable redundancy, and the ASIL qualifications for nighttime functionality.
Each question seemed to generate more questions — which is typical of the current situation. It is evident that a camera alone will not suffice. Is adding radar sufficient, along with AI if it can really better classify objects and pedestrians? How will these systems perform in bad weather?
IR cameras or lidars could meet regulations and exceed expectations, even at high speeds and in bad weather or smoky environments. The cost of IR cameras has decreased significantly, targeting $100 by 2029. But concerns remain about the supply chain’s capacity to produce the required quantities within four years.
Presentations covered a variety of AEB aspects. There were demonstrator cars from Compal, Valeo, Magna, Adasky, and Forvia Hella, showing impressive thermal cameras and object classification performance, as well as exhibits from Compal and Teledyne FLIR.

Key Takeaways
- FMVSS 127 was published on 2 March 2025. It’s being challenged in court, but for now, the clock is counting down until the requirements come into force on all new cars.
- It will be difficult to change the rule since any change would require an approval of the US Congress.
- One challenge is the short timing applying to all new vehicles from 2029 (new and existing models). This might change.
- It seems unrealistic and very expensive to rework low beams by 2029 on all models. Any improvement would conflict with the fraught glare issue, which means the benefit will be limited. The easiest way would be to implement ADB to benefit from the high beam when it is possible.
- The high-speed AEB test scenarios are more stringent than the EU-NCAP ones, with a pass / fail criterion. This might require another sensor to augment the camera’s limited nighttime performance.
- Some of the FMVSS 127 tests have been run with multiple brands and a limited number of models. Only one car passed, showing that automakers are not ready (though NHTSA took that single-car pass as evidence that the standard is technically feasible).
- Validation of false-positive avoidance will be a huge task; simulations will be necessary.
- The consensus is it should be possible to keep an ASIL B level for the system.
- The front camera has limited performance with the low beam.
- Improving the resolution of the imagers might help a bit, and then implementing split pixels or LOFIC solutions (Omnivision), but betting on a camera-only system is a serious risk. One key will be how much more performance can be squeezed out of the AI detection algorithms.
- Adding a radar might be a good solution; radar technology is cheap and might improve by using AI software which to discriminate static objects (Zendar, Perciv). Of course, there is a challenge to retrofit this into existing models.
- Magna thinks it’s practical to reduce false positives by using ADB + camera + radar, all on-shelf technologies available at reasonable cost.
- Valeo suggests a scalable system to avoid betting on one technology, thus minimizing the risk of a technical dead-end.
- IR cameras give good detection performance with pedestrians, and a cost of $80 – $100 should be achievable with high volumes.
- Lidar would be good, especially FMCW lidar with doppler like a radar, but needs time before the cost becomes acceptable. If lidar is on the vehicle for other functions anyway, then it can be used for AEB.
- Some automakers are expected to go with these new technologies, mainly premium brands or those promoting high safety performance.
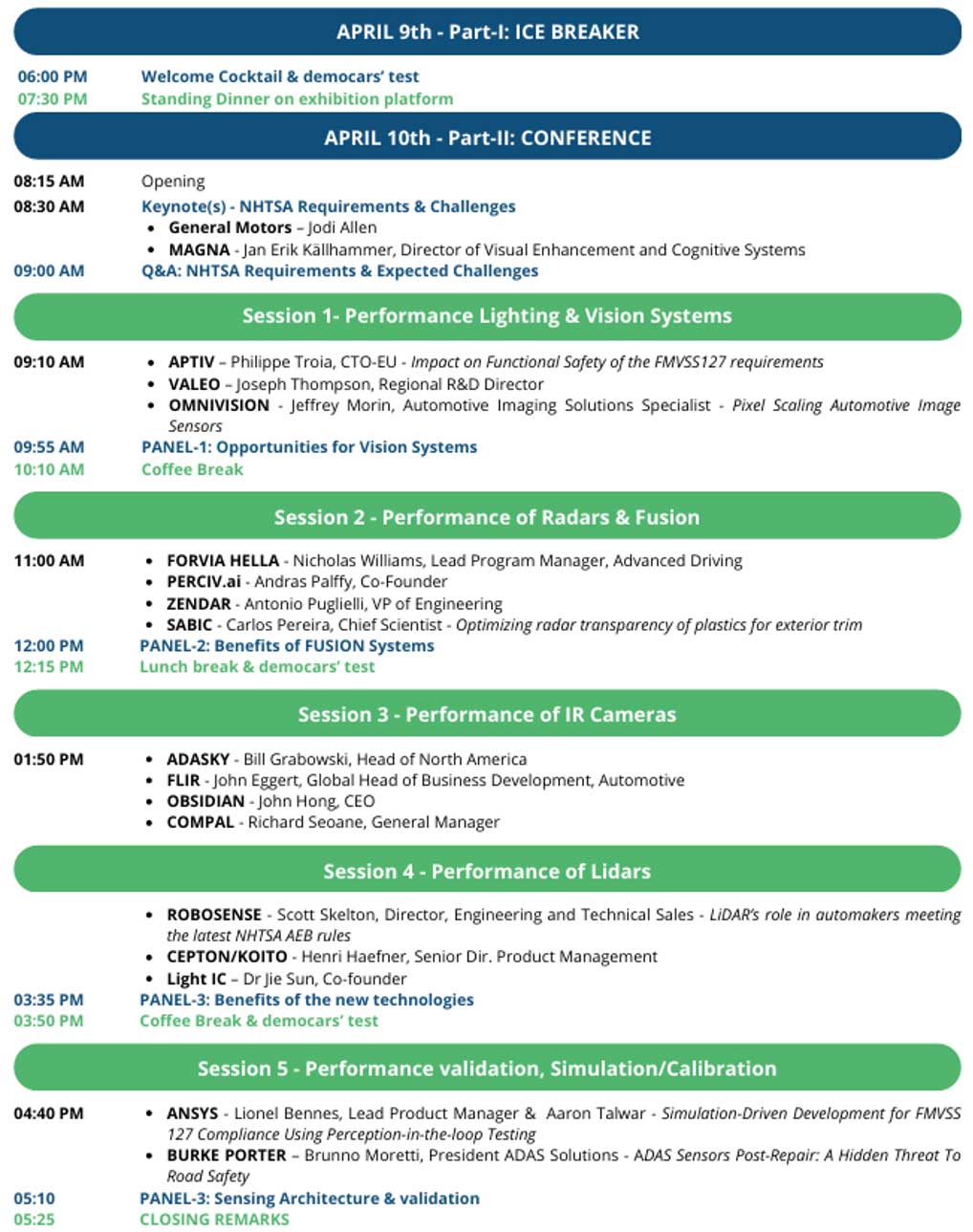
Here is the event program and roster of presenters. DVN members will soon have access to those presentations released for publication.
Speakers
















