9 月中旬,初创公司 Driveblocks 从各种投资者那里获得了 200 万欧元的资金。这家总部位于慕尼黑的公司开发用于环境识别的软件。其特点之一是其模块化结构。筹集的资金将用于实现新功能并进行更多实际测试。
所有应用程序的对象识别结构都是相似的。相同的软件平台可用于不同的车辆平台和应用领域。这降低了不可预见的边缘情况的风险。所有软件模块都将用于基于传感器的环境检测。
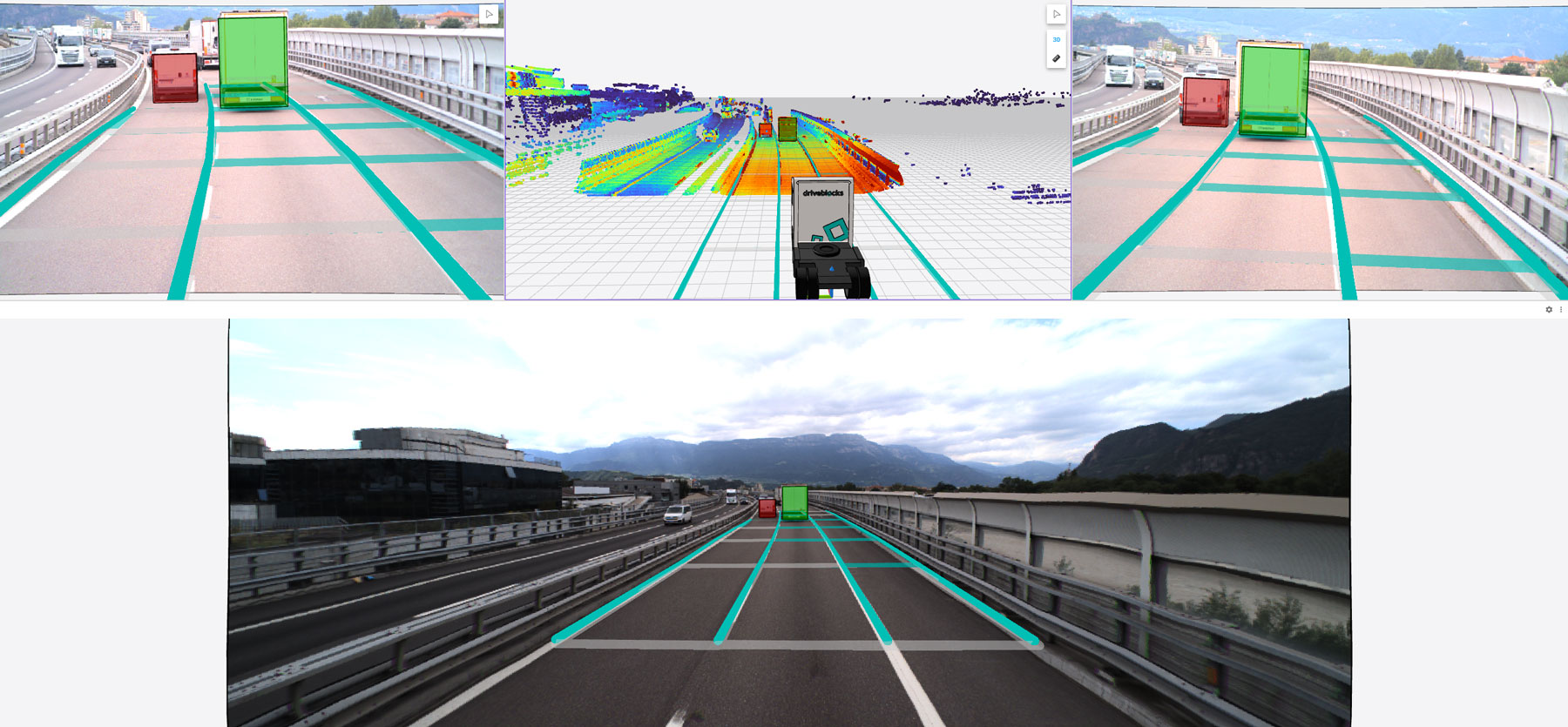
所谓的“无地图自动驾驶平台”是针对所有可驾驶区域的环境检测系统。关键是该技术使用已识别的元素(例如车道和车辆)创建地图。数据不必提前提供。这是一个决定性的优势,例如在道路工程中。除了 HD 卡之外,客户还有一个回退级别。
其基本理念是使用来自许多不同传感器位置和类型的数据来训练神经网络。这使得系统更加稳健,不易受到环境变化的影响,例如不同的照明条件。所谓的 transformer 神经网络用于此目的。这项技术以 Chat GPT 而闻名,它从传感器数据的整个上下文中提取信息。卷积神经网络等传统系统无法做到这一点。它们仅使用图像的局部区域,并尝试识别与周围环境隔离的对象。
每个传感器的单独神经网络都以相同的方式进行训练。如果一个传感器发生故障,所有其他传感器都继续工作。对于最终决策,使用基于概率的融合算法合并数据。










