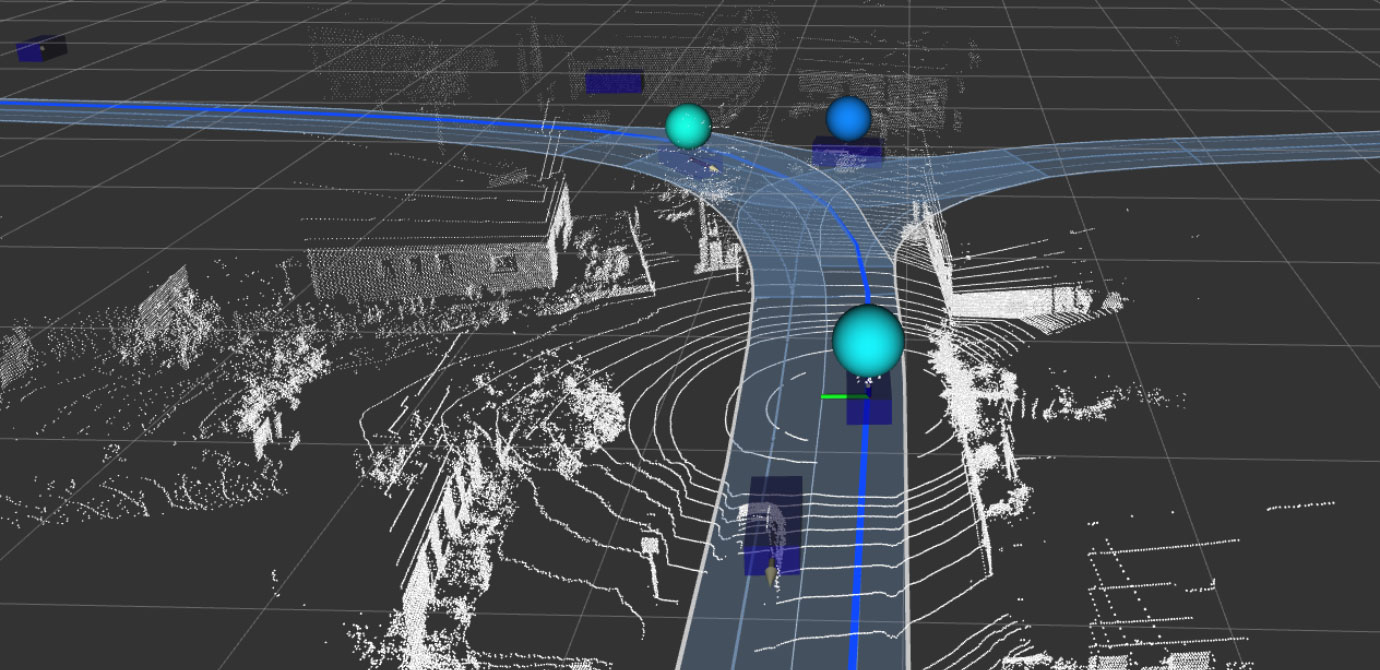
在“复杂交通情况下协同自动驾驶的局部环境模型”研究项目(Lukas)中,博世、InMach、IT设计师、梅赛德斯-奔驰、诺基亚以及乌尔姆大学和杜伊斯堡-埃森大学研究了城市未来的混合交通以及提高交通安全和效率的方法。这主要通过使用来自当地环境的数据以及自动和非自动道路使用者与基础设施之间的通信来实现。该项目在乌尔姆莱尔区的一个十字路口进行。试点设施配备了带视频、激光雷达和雷达传感器的灯柱。
直接连接到 5G 网络的边缘服务器从道路使用者那里收集预处理的数据,并使用人工智能方法等来计算优化的协作机动并将行动指令传输给联网的道路使用者。其中包括与智能手机应用程序和部分自动乘用车联网的行人和骑自行车的人。
该项目由德国联邦经济和气候保护部资助,作为新车辆和系统技术专业计划的一部分,投资额为520万欧元。








