The Autosens tech expo took place in Barcelona on 7 – 9 October. Vision technology was highly represented, as well as chip suppliers and the associated ecosystem of electrical and communications architecture.
Sessions (not including in-cabin)
Precision Perception I: Innovations in Sensor Hardware
cutting-edge sensor hardware that is driving autonomous vehicle development. From event-based sensing to neuromorphic vision.
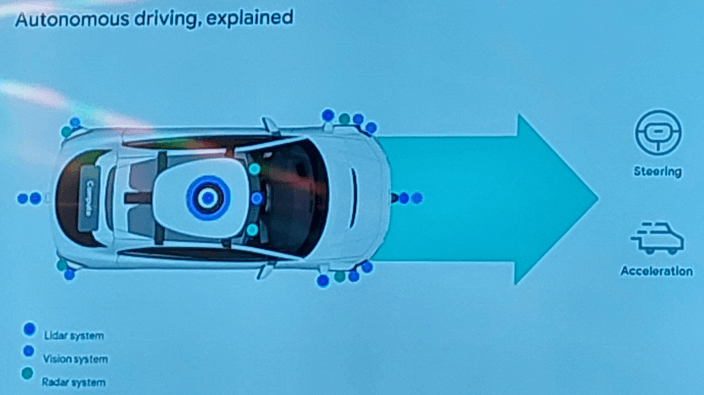
Precision Perception I: Multi-Modal Technologies and Sensor Fusion
multi-modal technologies and sensor fusion, which are key to building a comprehensive understanding of a vehicle’s environment.
Semiconductors, SoCs, and Evolving Architectures
Semiconductors, SoCs – how evolving architectures are enhancing intelligent perception systems and data integration techniques – the effects of software-defined vehicles on automotive technologies.
Validation, Standards, & Regulatory Landscapes
Latest updates in validation, standards, and regulatory landscapes (ISO, IEEE, FMVSS 127)…
AI & Simulation: Friends or Foes in Testing?
AI is revolutionising simulation by generating test scenarios, refining digital twins, and optimising development. Can virtual environments truly capture real-world complexity?
Some interesting presentations
Radar
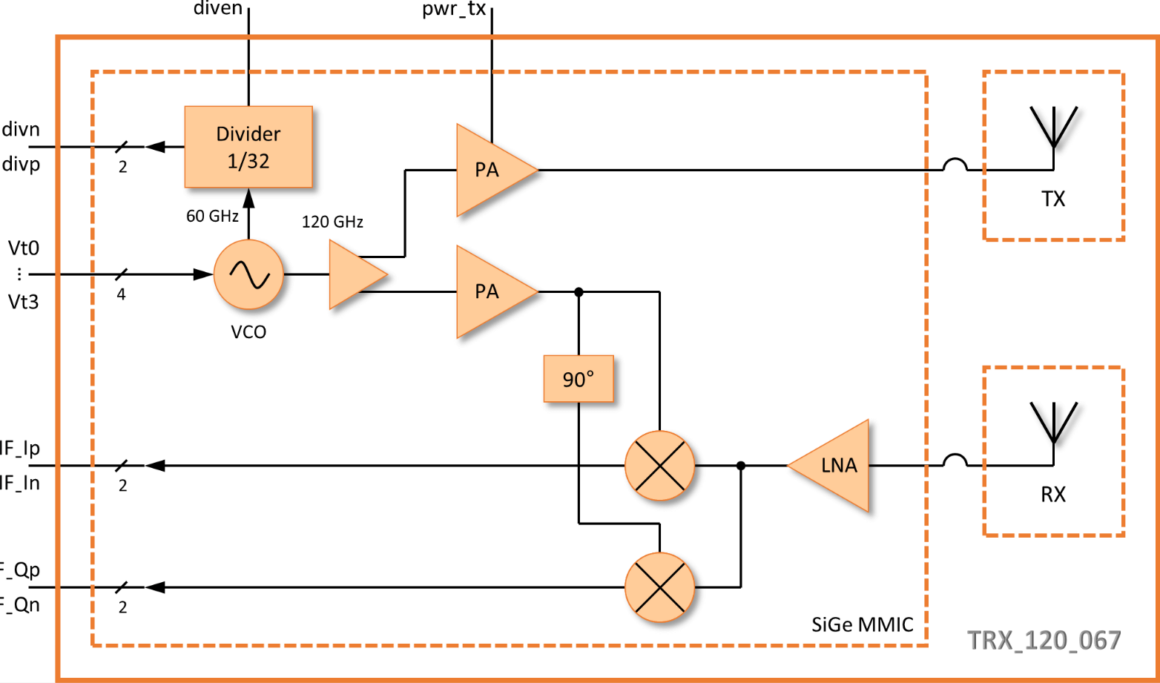
Indie Semi presented a new transceiver for 120-GHz radar, with antenna in package, and a wide band of 6 GHz. The main field of application for the 120-GHz transceiver radar front-end is in short range radar systems with a range up to about 10 meters. By using dielectric lenses or reflectors, the range can be increased considerably. The RFE can be used in FMCW mode as well as in CW mode. Although the chip is intended for use in the ISM band 122 to 123 GHz, it is also possible to extend the bandwidth to the full tuning range of 6 GHz. Applications include collision avoidance, industrial sensing, vital-signs detection in healthcare, predictive maintenance of rotating machines, material analysis, and quality control.
Teradar presented a proof of concept of their 300-GHz radar, with antenna in package. The technology is engineered to provide reliable, high-resolution imaging at long ranges, even in weather conditions such as rain or fog – far surpassing traditional radar systems and offering a sensing alternative to automotive lidar, all at a significantly reduced cost.

Characteristics
• Performance and cost scale with Tx and Rx channels
• Operating frequency above 300 GHz,
• Range 150 to 300m (10 dBsm)
• FoV: 120° × 20°, 20 Hz
• Angular resolution 0.05°,
• no MIMO required = no ambiguity risk
Maturity
• A-sample (PoC) available with FoV 120° × 10°, 10 Hz
• B-sample planned in January 2026: FoV 120° × 20°, 20 Hz
• C-samples expected in 2027
• Manufacturing: 300-mm wafer from an existing fab (no process development)
IR Cameras
Cost is key for the thermal camera to get more business. Seek thermal presented a specific low-cost (<€100) CMOS design to support low-light and all weather AEB.

Characteristics include:
• Powerful SoC to support AI algorithms
• 128 × 192 array (10 µpixels)
• FoV 45° × 31°
• Resolution 0.165° per pixel
• Pedestrian detection at 60m (adult, at 65 km/h)
Zonal architecture
The first applications are coming on the market with a high priority and strong benefit to reduce harness complexity and weight. It doesn’t mean the sensors are part of the zonal architecture, they can be still connected directly to the domain ECU.
Cameras
Suppliers like Onsemi presented improvements for low-light detection, to support FMVSS 127 compliance.
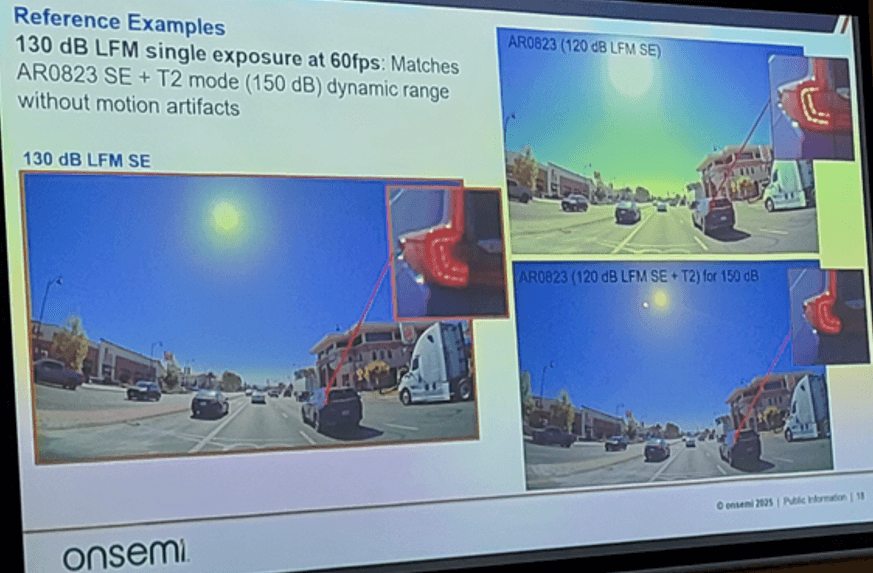
Characteristics include:
• 130-dB LFM single exposure at 60 fps (150 dB with double exposure), to mitigate image blur
• Enhanced detection accuracy to support algorithms improvements
• stable performance across temperature to avoid false positives, SNR >25 dB across temperature range
• single PD architecture
• Low-noise 2.1 µm pixel (optimum solution vs 1.4 µm)
A single camera should be able to support FMVSS 127 compliance but Onsemi said the proof of concept is still ongoing.
Aumovio presented an overview of automotive camera technology over the past decade.
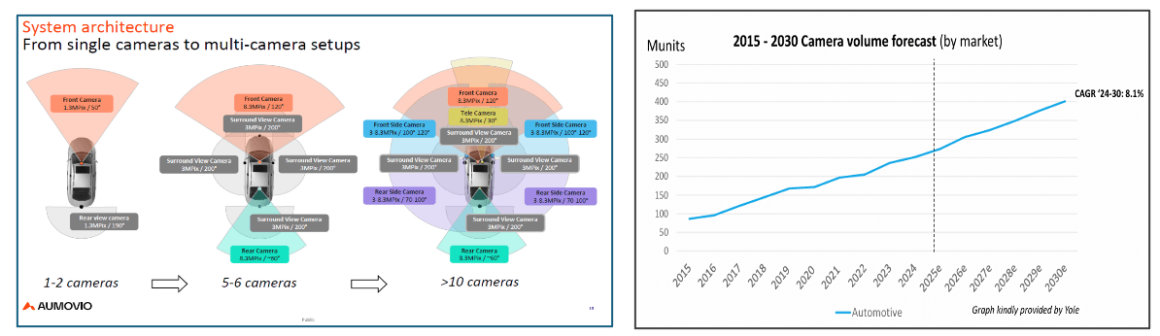

The presentation covered:
• The evolution from single- to multi-camera setups, with increased field of view and camera variants for different applications, with concomitant growth in camera module volumes.
• The transitionfrom smart cameras to satellite cameras for higher SAE levels
• Advancements in optics including higher FoV, variable-distortion lenses, and improved performance under wider ranges of conditions, as well as cCost pressure leading to new designs like hybrid lenses.
• Progress in resolution and pixel size, with the megapixel race at a slower pace compared to mobile phones. Enhanced technologies like back-side illumination, HDR schemes, and cybersecurity features. Improved performance in low-light sensitivity, dynamic range, and signal-to-noise ratio.
• Manufacturing matters like challenges in precision, sealing, testing, and calibration during camera production. Active lens alignment was identified as a key area for investment.
• Development of virtual-scene creation, simulation frameworks, and sensor models for hardware/software integration. Focus on realistic sensor modelling and RAW sensor output formation.
• Enhanced night/all-weather sensitivity, new sensor modalities, and cleaning/heating solutions for higher availability. Increased computer vision capabilities with AI-based perception and scene understanding. Cost reductions through optimized materials and manufacturing processes.
ADAS/AV Validation processes
ADAS consumer acceptance is a growing point of concern, with automakers pushing to remove several ADAS functions not welcomed by users (lane departure warning, for example). It is important to consider customer needs and acceptance before designing ‘super ADAS’ functions which look complicated and give little added value for day-to-day driving.
Autonomous modes and safety risks
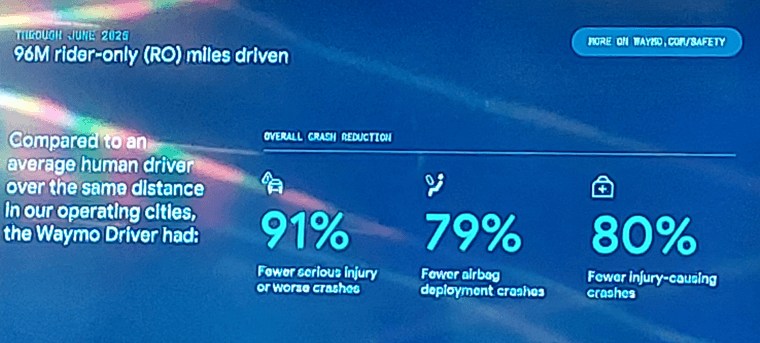
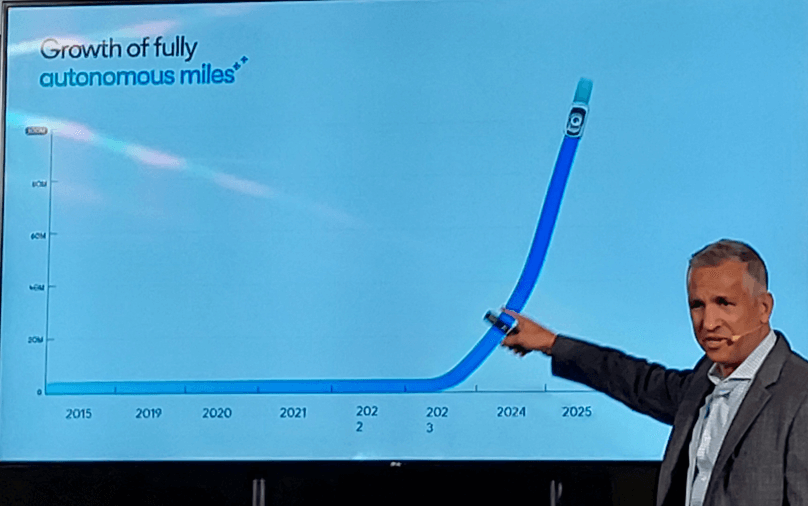
One panel discussion was related to ISO 26262, entitled “When ISO 26262 Isn’t Enough – FuSa Challenges in AI and Perception”. Discussion swung back and forth between the market demands (machines have to be perfect to be accepted) and realism (perfection is not possible). There was a lot of respect in the room for Waymo’s approach, and a key takeaway was the phrase the absence of unreasonable risk. Waymo’s step-by-step approach is for sure a good way to continue, with a cautious deployment process to minimize safety risks and maximize customer acceptance.
Robust ADAS Validation Processes

The increasing complexity of software requires a fundamental re-evaluation of the validation process. By 2025, vehicles could contain up to 1,200 million lines of code. Deloitte Consulting presented a global and rigorous approach to manage AVs validation process, using a top-down systematic approach based on the identification of risks. This approach can be standard across car models.
A risk-based testing framework is proposed to improve the efficiency of testing. Tests can run on both physical and virtual platforms. Documentation of test results is essential for type approval. Transition to virtual testing could reduce testing costs by 20 to 30 per cent. Four fundamental requirements must be met: quality strategy, standard development processes, code quality key performance indicators (KPIs), and testing efficiency.
The experience of the UN R155, R156, and R157 projects is used to build a process framework for UN R171. Continuous driver involvement is crucial to avoid overconfidence in the systems.
A dynamic risk model is needed to identify and mitigate weaknesses in the system, using root cause analysis and validation of mitigation actions. Transparency on residual risks is crucial for the selection of validation methods.
In-Cabin Sensing for Passive Safety
Bosch presented a solution for NCAP 2026 & Beyond.
Advanced Monitoring combines perception data for improved safety by keeping track of airbag control, child restraint detection, and seatbelt use. Focus areas include child presence/safety, seatbelt reminders, occupant classification, seat occupancy, and misuse detection. Interior sensing points include belt routing, child restraint and occupant detection, stature classification, out-of-position detection, and child presence alerts.
FMVSS 208 requires airbag deployment tailored by occupant age and position, and Euro NCAP prioritizes occupant monitoring for 5-star ratings. The outlook involves moving from static to real-time, dynamic occupant assessment, adaptive airbag deployment via probabilistic AI models, and validation per ISO 26262 and PAS 8800.
Photo Gallery